VENKATRAGHAVAN
A seasoned mechanical engineering leader with over 6 years of experience, I specialize in transforming innovative concepts into market-ready products. My expertise spans a variety of manufacturing processes, including injection molding, sheet metal fabrication, PCB interconnects, casting, and vacuum forming.

SOFTBALL COLLECTOR
Mechatronics Project
The objective was :
Collect, transport, and off load supply drops (Softballs) and secure storage door. Following was in a 7'x7' arena with a 12"x12"x12" bot dimension limit.
This design includes a two wheel front drive chassis with two caster wheels,
PIXY camera for ball location sensing, a driven gripping arm for ball collection, and a ramp with
release lever for delivery into the storage container.
Overview
ABOUT THE BOT

RESEARCH METHOD
Functional decomposition was done to identify the various tasks that needed to be done to collect the softball.
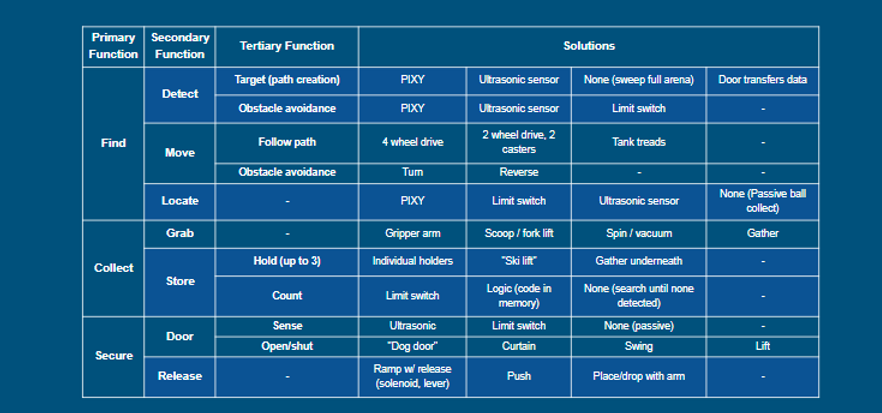
CONCEPT GENERATION
The list of functions were then tabulated and different methods of performing the functions were noted down. This gives an overview of the various options available
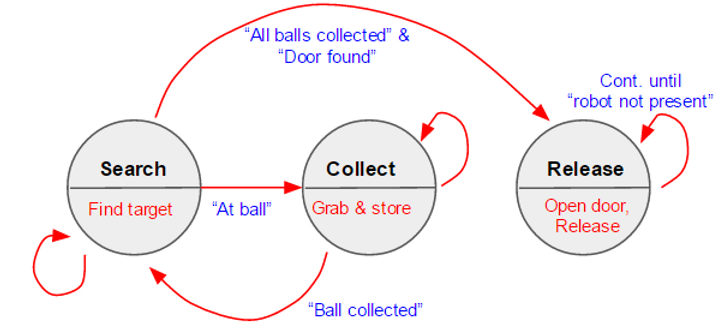
FINITE STATE MACHINE
A finite state machine captures all the inputs and the outputs of the robot at every stage in a sequential manner thereby making the coding for the programmer easy.

CHASSIS
-The drive system selected included two drive motors in front and two casters in the rear to provide enough power to move the weight of the design as well as precision for movement.
-Acrylic of 6 mm thickness was used as base of the robot due to its advantages of strength and machinability with the laser cut machine.
-the torque required for the robot was 1.2kgcm and the motors used were equipped to provide 5kgcm stall torque.
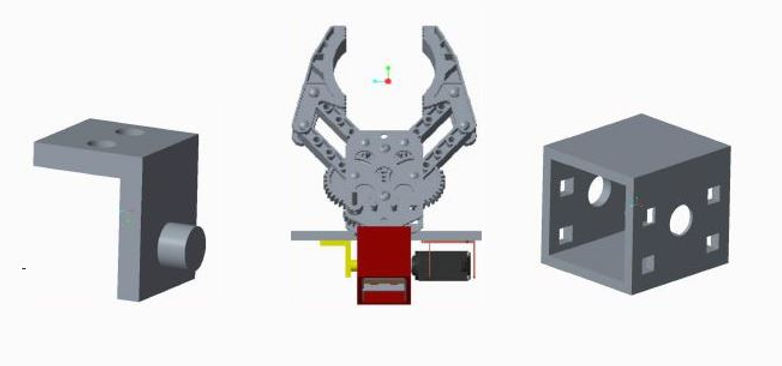
GRIPPER
A gripper mechanism was used to collect the ball in a precise manner and lift and place it in the bot ramp.
A vex gripper was used and mounted using custom designed mounts to allow for larger turning moment and to hold heavy weights.
The gripper consisted of 2 servo motors , one for controlling the grip action at the claw and the second was used to lift the arm up and down to move the ball from ground level to the storage ramp where it is released.

FINAL BOT
The Bot was guided using a PIXY camera mounted at a suitable height to capture the maximum area in front of it. The Pixy feedback was used to locate the ball and subsequently guide the bot towards the ball and pick it up. Ultrasonic sensors were mounted on 3 directions to prevent the bot from crashing into the walls.
Following is a video during testing phase
VIDEO




